造车日记 - 开篇
缘起
看到大疆 RoboMaster S1之后,就有了自己也做一台小车的想法。
当然除了以后给女儿当玩具玩儿之外,目的还是非常明确的。
在硬件层面
主要是尝试新技术以及为一些技术的工程化积累经验。包含但不限于
- CAN/ Ethercat 等现场总线
- 高等级嵌入式芯片和开发
- 各种新传感器
在软件层
有一个专一但是庞大的目标:实践vSLAM
在目前已知的室内定位技术中,总感觉 基于RGB-D的vSLAM是才王道,其它都是异端,虽然异端也有异端的作用。
首批硬件
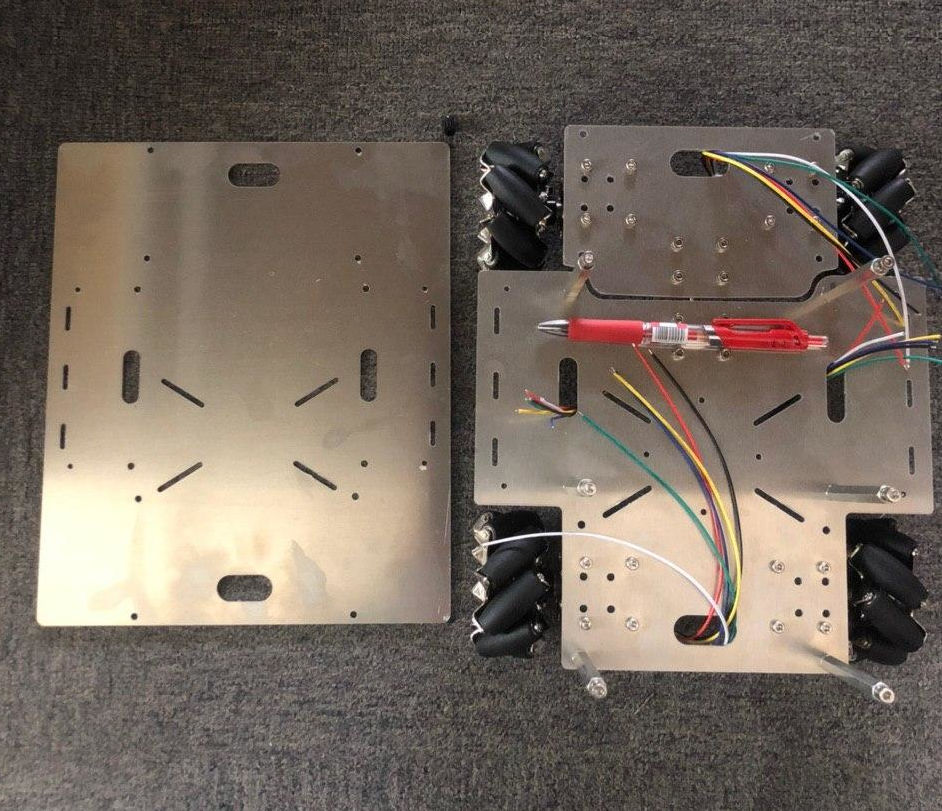
底盘
最近工作原因多少接触了一些CAD软件,本来想着自己从头画图开料,但是毕竟不是本行,时间花在这个上面不是太划算,于是就花了几个晚上逛了逛 窑子 不对淘宝。终于找到了还算满意的小平台。四麦克纳姆轮。
和老板哭了一会儿穷(真穷),饶了我¥40块,尽管如此,心还是在滴血…
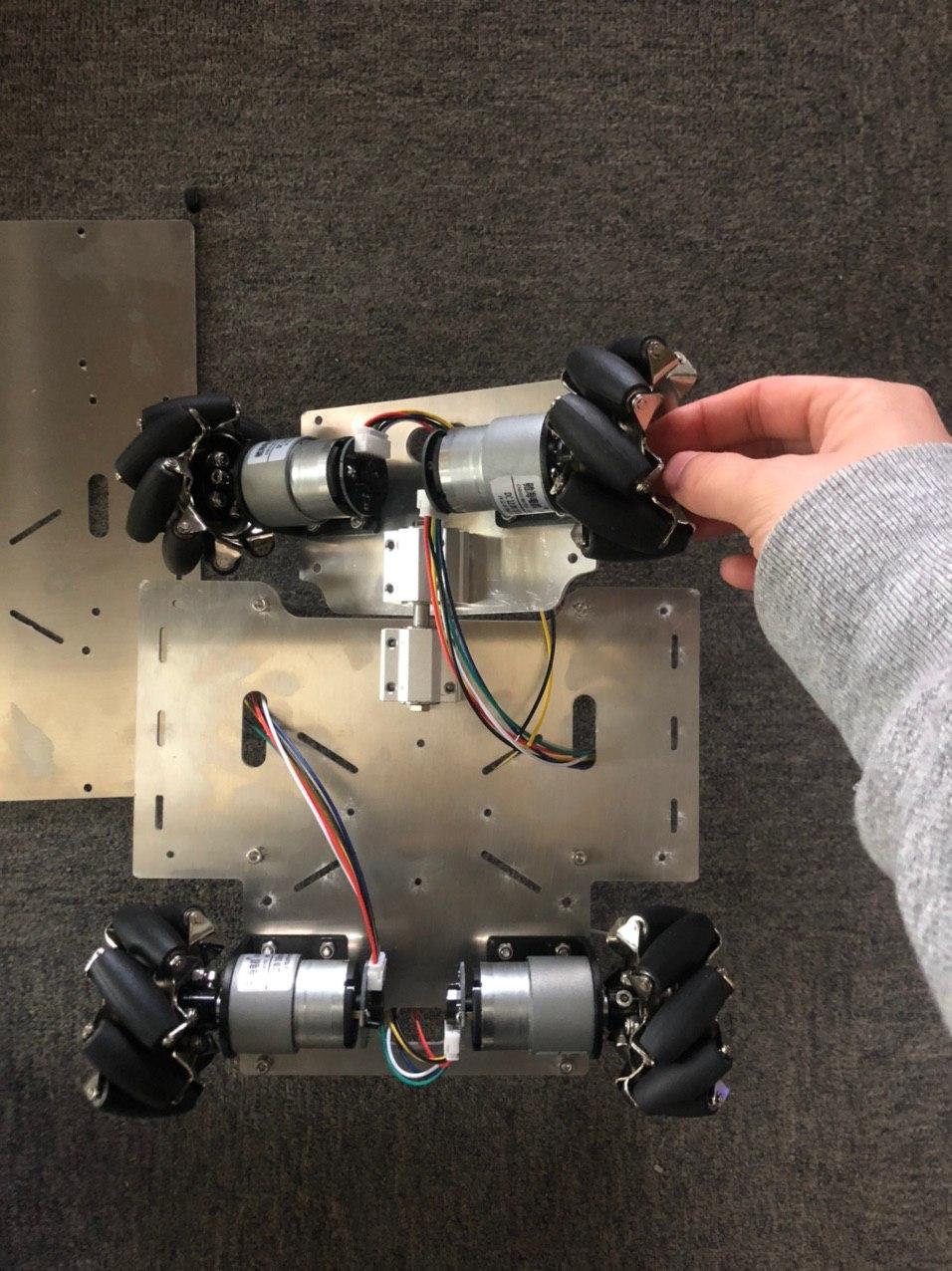
底部的一个设计还是挺好的,虽然买不起四轴独立悬架版本,好歹有一个低成本板车方案 ^_^
因为成本问题, 这版就先用有刷电机,等我FoC完全整明白了, 再给换装无刷电机。
动力电池
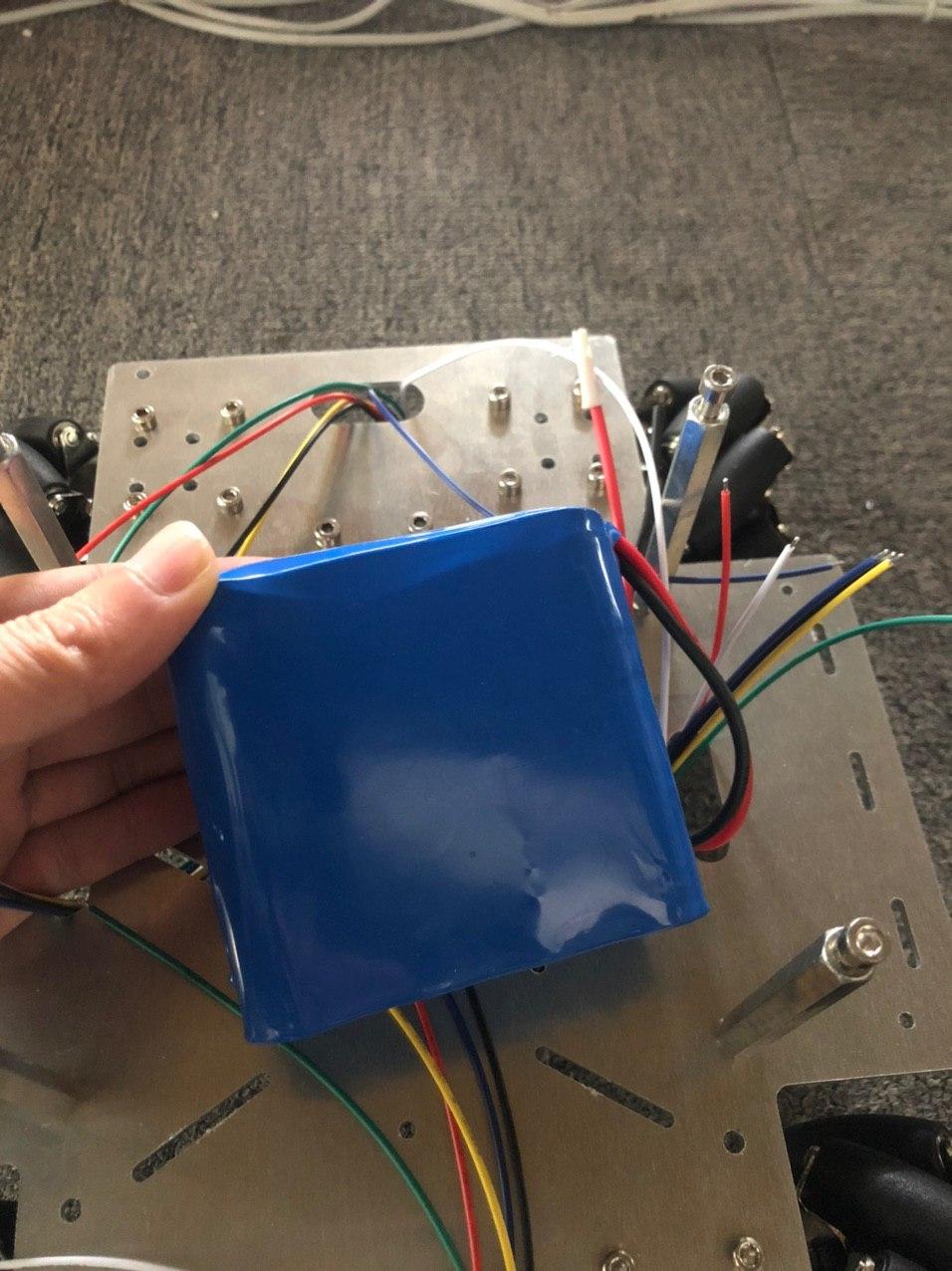
采用了特斯拉 3系同款的 21700电芯,4s2p结构。相比比传统的18650电池
- 价格更低
- 容量更高
- 内阻更低
- 一致性更好
- 寿命更长
原打算自己做BMS的,后来想想,一共就8颗电芯,好像啥管理必要了,直接让卖家给我封了一块充放电同口的保护板进去了事。¥170块。
遥控
第一阶段的调试,也是为了好玩,一个能直接用的手柄还是需要的。
taobao又搜了一个晚上,发现这个。乐视的手柄。虽然我对乐视完全无感,但是¥40块钱,无线,还能说啥。
然后,到手之后发现, 手感还不错。就是有一个按键不太灵光,和老板反应了,他居然说要不就退款,这个就算送给我,要不就再给我寄一个,这个也送给我。。。
那个坏的键, 我拆开看过, 其实内部开关都是好的, 就是模具有点儿问题, 中间垫个纸片就几乎完美。于是我花了¥40块买了两个手柄。
这个手柄在LinuX可以使用大部分功能,目前震动还不知道怎么搞出来,似乎不是标准协议…问题不大。
主控(暂定)
RK3399
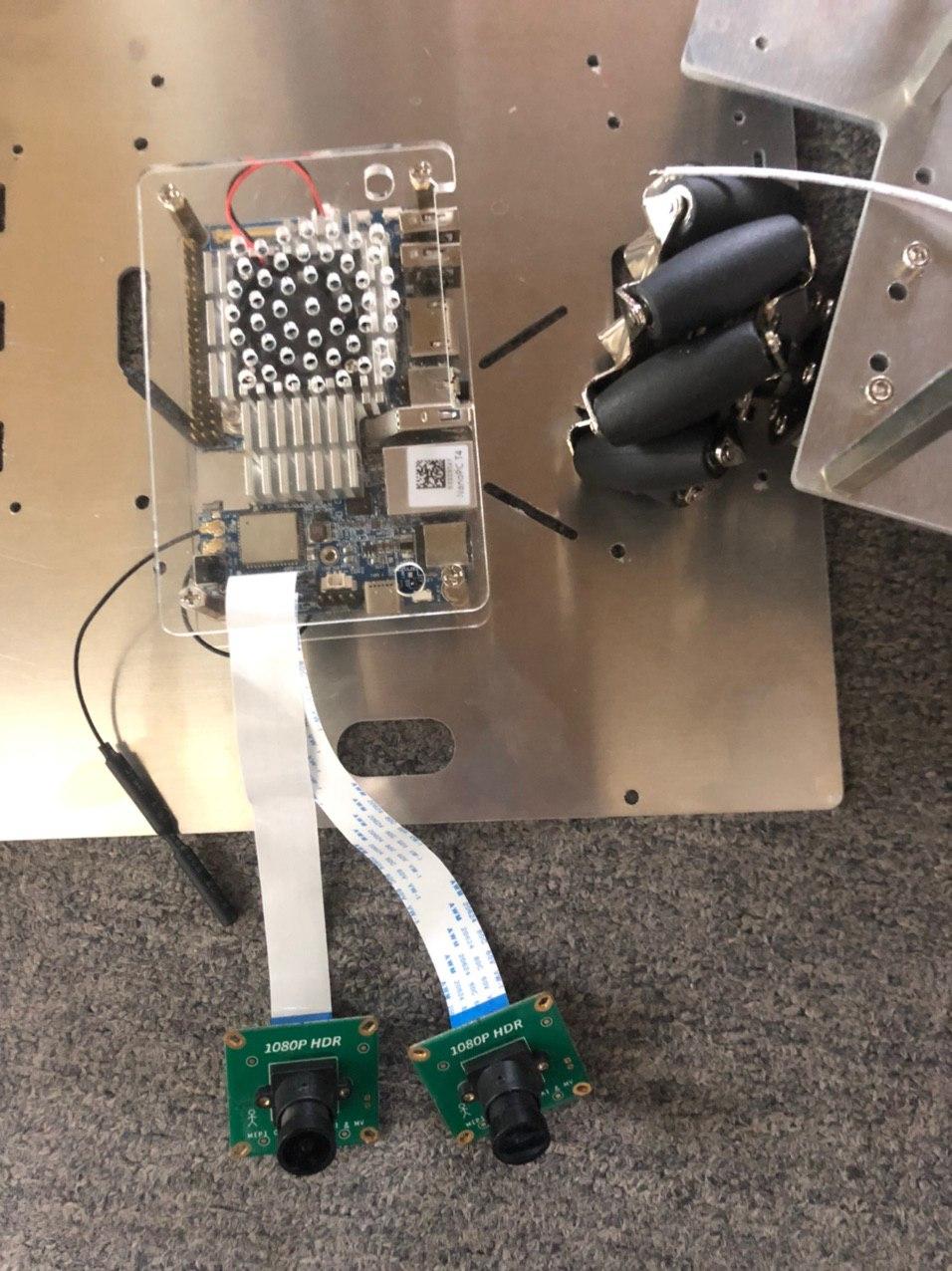
双摄也有,倒是看看同步的情况,以及适合不适合跑slam。