由于各种原因,和本番相关的工作被严重耽误……以至于错过大好机会
痛定思痛 痛何如哉
本番行文后,将在另外一种形式上重启
在 【关于ToF 番二】 中介绍的ToF系统,使用连续调制光照射外界,并通过多帧数据,计算得出反射光的相位偏移角度, 从而间接计算出光线行走距离。
但,这不是唯一的方式,本文介绍另外一种ToF相机的操作原理:脉冲式ToF
让我们来构建一个和连续调制方式ToF的有点儿相似但不完全相同的像素结构
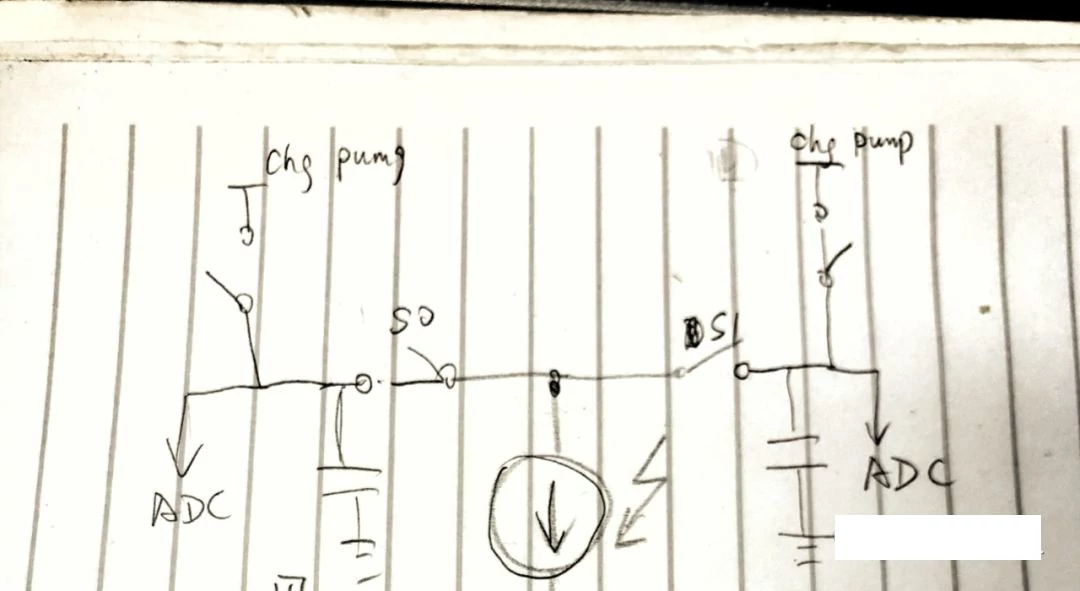
- 首先操作时, chg会打开,对两侧两颗电容充电
- 然后S0(或S1)进行开关操作,开关时机由调制模块控制
- 像素点开始曝光,并将光信号转变成电荷
- 当S0(或S1)闭合时,积分电荷就会和对应电容中和
- 最后读取电容中的剩余电压
然后有下图

- 第一行 代表受控的LED输出,正是因为这个,才被称之为脉冲式
- 第二行 代表实际的光线反射回波
LED发射的每个脉冲长度为 t, 而S0和S1的采样时长也为t,但是S0于LED同时开启,S1在S0关闭后立即打开。因此得到第三行和第四行
- 第三行 是S0的积分
- 第四行 是S1的积分
得到公式
d = 1/2 * C * t * (S0) / (S0 + S1)
可以看到,和连续调制ToF相比
- 脉冲ToF的结算会更容易。当然二者基本还是在一个水平线上,一个是加减乘除,一个带三角函数
- 连续调制ToF的像素点因为是差分结构,对环境光噪音的抑制有天生的优势
- 听说脉冲式ToF的精度会略高,当然还要看各自厂家的具体优化手段
- 连续调制ToF在计算中,可以得到一些附结论(比如误差估计)
最后附上一种连续调制式ToF的像素结构图